Skąd pobrać filmy za darmo – sprawdzone metody na bezpieczne ściąganie filmów Czasami, kiedy masz ochotę na wieczór filmowy, ale nie chcesz wydawać pieniędzy opublikowane przezRedakcja11 lutego, 2024
Jak skopiować SMS z telefonu na komputer: poradnik krok po kroku Czasami spotykamy się z sytuacją, gdy chcielibyśmy utrwalić ważne informacje opublikowane przezRedakcja11 lutego, 2024
Wyłączanie pakietu w Plush – krok po kroku Czasami po zastanowieniu decydujemy się na wyłączenie pakietu w swoim opublikowane przezRedakcja11 lutego, 2024
Jaka karta graficzna 2025: Przewodnik po kartach graficznych do 2000 zł i do 4K Chcesz się przygotować na przyszłość, mając na uwadze rok 2025? opublikowane przezRedakcja11 lutego, 2024
Bezpieczeństwo Filmy_seriale Ściąganie Skąd pobrać filmy za darmo – sprawdzone metody na bezpieczne ściąganie filmów opublikowane przezRedakcja11 lutego, 2024
Komputer Komputery Poradniki Telefony Jak skopiować SMS z telefonu na komputer: poradnik krok po kroku opublikowane przezRedakcja11 lutego, 2024
Pakiety Plush Poradniki Wyłączanie pakietu w Plush – krok po kroku opublikowane przezRedakcja11 lutego, 2024
Komputery Sprzęt Technologia Jaka karta graficzna 2025: Przewodnik po kartach graficznych do 2000 zł i do 4K opublikowane przezRedakcja11 lutego, 2024
Poradniki Smartfony Xiaomi Przenoszenie aplikacji na kartę SD w smartfonach Xiaomi i innych urządzeniach: łatwy poradnik opublikowane przezRedakcja10 lutego, 2024
Funkcje Przeglądarki Szybkość Najlepsza przeglądarka internetowa: Porównanie szybkości i funkcji popularnych przeglądarek opublikowane przezRedakcja10 lutego, 2024
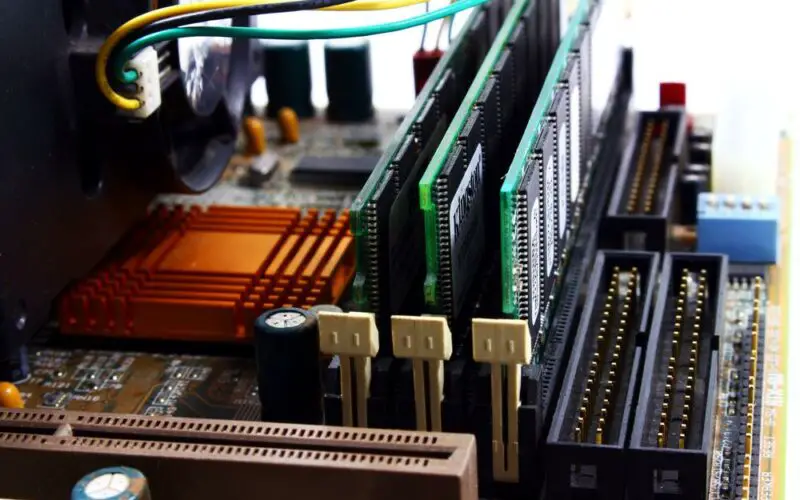
Komputery Poradniki Ram Dobieranie RAM do komputera: Poradnik jak wybrać i dołożyć pamięć RAM opublikowane przezRedakcja10 lutego, 2024
Nagrywanie Poradniki Smartfony Jak nagrać ekran telefonu: Praktyczny poradnik krok po kroku opublikowane przezRedakcja10 lutego, 2024
Multimedia Poradniki Technologia Podłączanie telefonu z telewizorem Samsung: prosty poradnik krok po kroku opublikowane przezRedakcja9 lutego, 2024
Bezpieczeństwo Optymalizacja Poradniki Usuwanie śmieci z komputera: poradnik jak pozbyć się niechcianych danych i robaków opublikowane przezRedakcja9 lutego, 2024
Cena Laptopy Porównania Jaki laptop 14 cali do 2000 zł? Porównanie propozycji do 2500 i 3000 zł oraz opcji 17 cali opublikowane przezRedakcja9 lutego, 2024
Komunikacja Messenger Poradniki Telekomunikacja Odczytanie Usuniętych Wiadomości Messenger: Przewodnik Krok po Kroku opublikowane przezRedakcja9 lutego, 2024
Porównanie Telefony Telewizory Jaki jest najlepszy telefon 2025? Porównanie modeli, tranów i telewizorów, które warto znać opublikowane przezRedakcja8 lutego, 2024
Porady Samochody Vin Sprawdź kolor i dane swojego samochodu po numerze VIN: proste kroki do odkrycia historii pojazdu opublikowane przezRedakcja8 lutego, 2024
Windows Wydajność Jak poprawić wydajność komputera Windows 10 i sprawdzić jej poziom na Windows 10 oraz 11 opublikowane przezRedakcja8 lutego, 2024
Multimedia Poradniki Technologia Odtwarzanie filmów z telefonu na telewizorze: prosty przewodnik opublikowane przezRedakcja8 lutego, 2024
Mac Multimedia Poradniki Otwieranie plików 7z, avi, mkv i rar na Macu: Poradnik krok po kroku opublikowane przezRedakcja8 lutego, 2024
Gry Mody Poradniki Jak pobierać i wgrać mody do The Sims 4: Przewodnik krok po kroku opublikowane przezRedakcja7 lutego, 2024
Filmy_seriale Przewodnik Streaming Belfer 2 gdzie obejrzeć: Twój przewodnik po najlepszych platformach streamingowych opublikowane przezRedakcja7 lutego, 2024
E-commerce Finanse Technologia Apple Pay i inne popularne metody płatności: Co to jest i jak działają opublikowane przezRedakcja7 lutego, 2024
Gry Technologia Xbox Xbox Game Pass Ultimate: Co daje, zawiera i dlaczego warto się zainteresować? Xbox Game Pass Ultimate to usługa, która zrewolucjonizowała sposób, w jaki 3 minuty czytania
Gry Poradniki Symulatory Jak zainstalować Farming Simulator 19 za darmo: Poradnik dla miłośników symulatorów rolniczych Czy lubisz symulatory rolnicze, a konkretnie Farming Simulator? 3 minuty czytania
Bezpieczeństwo Poradniki Smartfony Jak sprawdzić czy telefon jest zhakowany? Poznaj kody i metody dla iPhone i Androida Wyobraź sobie sytuację, w której w Twoim telefonie dzieją się rzeczy, których 3 minuty czytania
Niezawodne łączenie dźwięku: Jak sparować słuchawki Sony i innych marek z telefonem krok po kroku Czy wiesz, że łączenie słuchawek z telefonem może być równie przyjemne i łatwe opublikowane przezRedakcja15 stycznia, 20243 minuty czytania
Jak pobrać radio i inne aplikacje na telefon: krok po kroku Czy zastanawiałeś się kiedyś, jak pobrać radio na telefon lub inne przydatne opublikowane przezRedakcja16 stycznia, 20243 minuty czytania
Bezpieczeństwo Filmy_seriale Ściąganie Skąd pobrać filmy za darmo – sprawdzone metody na bezpieczne ściąganie filmów Czasami, kiedy masz ochotę na wieczór filmowy, ale nie chcesz wydawać pieniędzy 3 minuty czytania
Jak ściągać Minecraft za darmo: Praktyczny przewodnik Chciałbyś zagrać w Minecraft, ale niekoniecznie masz zamiar od razu wydawać opublikowane przezRedakcja6 lutego, 20243 minuty czytania
Jak zalogować się do PPK i innych platform online: poradnik krok po kroku Czasami proces logowania do różnych platform internetowych może nastręczać opublikowane przezRedakcja6 lutego, 20243 minuty czytania
Jak przywrócić iPhone do ustawień fabrycznych – Prosty przewodnik krok po kroku Czasami zdarza się, że nasz iPhone zaczyna działać wolniej, gromadzi zbędne opublikowane przezRedakcja5 lutego, 20243 minuty czytania
Jak skutecznie wyczyścić telefon ze śmieci: poradnik krok po kroku Czytelne i wydajne działa smartfon, który jest oczyszczony ze zbędnych opublikowane przezRedakcja5 lutego, 2024
Jak zainstalować Minecraft za darmo na telefon: praktyczny poradnik Chyba każdy fan gier wideo słyszał o Minecraft – niesamowicie popularnej opublikowane przezRedakcja5 lutego, 2024
Podłączanie pendrive’a do HDMI i innych urządzeń: krok po kroku Czasami chcemy wyświetlić zdjęcia, filmy lub prezentacje zapisane na opublikowane przezRedakcja5 lutego, 2024